Actividad MT07
Actividad MT07: Interfaces digitales y aplicaciones
El módulo MT07 fue una experiencia completa, donde se combinó la programación en el ESP32 con el diseño de un servidor web para controlar un servo motor y la integración de sensores. Este trabajo me permitió consolidar conocimientos en IoT, protocolo HTTP y en el manejo de hardware mediante un enfoque práctico.
Lo que hice
- Configuración del ESP32: Configuré el ESP32 para que actúe como un servidor web capaz de recibir comandos desde un navegador. Utilicé la librería
WebServerpara gestionar las rutas HTTP. - Control del Servo: Implementé el control de un servo motor conectado al ESP32. Desde la página web, pude iniciar y detener el movimiento del servo, asegurando una interacción fluida entre hardware y software.
- Integración del Sensor Ultrasónico: Añadí un sensor ultrasónico para medir distancias en tiempo real y mostrar los datos en la página web, con la posibilidad de activar o desactivar esta funcionalidad.
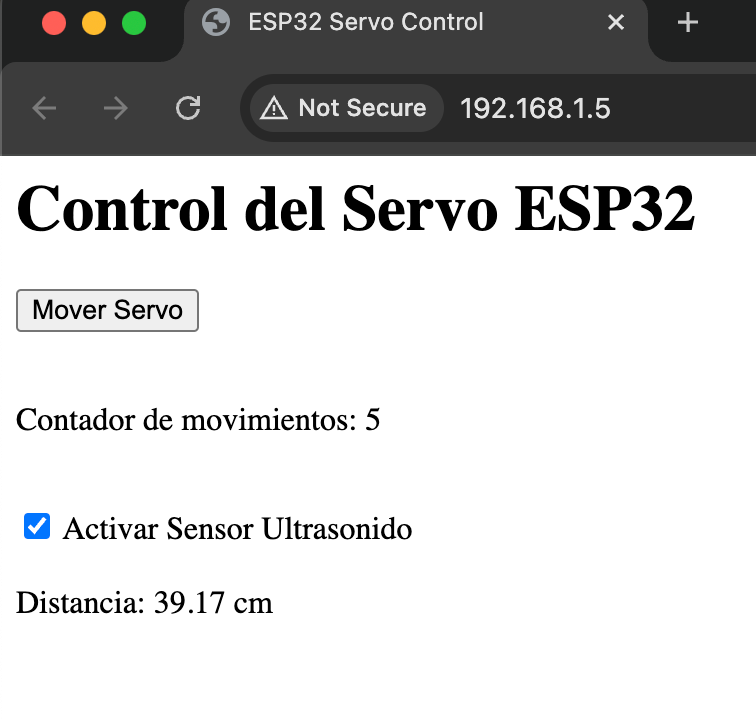
- Página Web Interactiva: Diseñé una interfaz HTML simple con botones y scripts en JavaScript para enviar solicitudes HTTP al ESP32, logrando una interacción en tiempo real con los componentes.
Desafíos y cómo los resolví
1. Movimiento constante del servo sin control
- Problema: Inicialmente, el servo se movía constantemente, incluso cuando no interactuaba con el botón de la página web.
- Causa: La función
moveServono estaba condicionada al estado del botón, lo que provocaba un movimiento continuo. - Solución:
- Introduje una variable llamada
servoActivepara controlar el estado del servo. - Aseguré que el servo solo se moviera cuando el botón en la página web activara esta funcionalidad.
- Ajusté la lógica en
moveServopara que respetara los límites de movimiento (0-180 grados) y alternara correctamente la dirección.
- Introduje una variable llamada
2. Lógica del movimiento del servo
- Problema: El servo no regresaba correctamente al sentido contrario después de alcanzar los límites (0 o 180 grados).
- Causa: La lógica para invertir la dirección tenía errores, lo que impedía que el servo oscilara de manera continua.
- Solución:
- Separé las condiciones para incrementar y decrementar el ángulo del servo.
- Implementé una inversión clara de la variable
directional alcanzar los límites.
3. Problemas de conexión al Wi-Fi
- Problema: Durante las pruebas, el ESP32 a veces tardaba mucho en conectarse al Wi-Fi.
- Causa: La red local tenía un tiempo de respuesta lento o inestable.
- Solución:
- Añadí un mensaje en el monitor serial para que indicara el progreso de la conexión (
.cada 500 ms). - Configuré un timeout razonable para evitar que el ESP32 quedara bloqueado esperando la conexión indefinidamente.
- Añadí un mensaje en el monitor serial para que indicara el progreso de la conexión (
4. Visualización de datos en la página web
- Problema: Los datos del sensor ultrasónico no se actualizaban correctamente en la interfaz web.
- Causa: El script en JavaScript no gestionaba adecuadamente el estado del checkbox para activar/desactivar el sensor.
- Solución:
- Revisé el script para que monitoreara el estado del checkbox y enviara solicitudes HTTP solo cuando el sensor estuviera activado.
- Implementé una ruta
/ultrasonic-dataen el ESP32 para devolver los datos en formato texto.
Resultados
Al final del módulo, logré:
- Un control completo y funcional del servo motor desde una página web.
- La integración de datos en tiempo real del sensor ultrasónico en la interfaz web.
- La consolidación de conceptos de IoT, incluyendo el uso del protocolo HTTP y el manejo del ESP32 como servidor.
Este módulo me permitió no solo enfrentar desafíos técnicos, sino también reforzar mi capacidad para identificar problemas, analizar sus causas y aplicar soluciones efectivas.
Código Final
#include <WiFi.h>
#include <ESP32Servo.h>
#include <WebServer.h>
const int SERVO_PIN = 19;
const int BUTTON_PIN = 4;
const int TRIG_PIN = 17;
const int ECHO_PIN = 16;
Servo sg90;
WebServer server(80);
int buttonState = 0;
int previousButtonState = HIGH;
int currentAngle = 0;
bool direction = false;
bool ultrasonicActive = false;
bool servoActive = false; // Variable para controlar el movimiento del servo
int moveCounter = 0;
unsigned long previousMillis = 0;
const long interval = 15;
const char *ssid = "BaldeDeCarnadas";
const char *password = "esunaclaveoculta";
void handleRoot();
void handleUltrasonicData();
void handleGetMoveCounter();
void handleMoveServoStart();
void handleMoveServoStop();
void handleStartUltrasonic();
void handleStopUltrasonic();
void moveServo();
void setup()
{
Serial.begin(115200);
pinMode(BUTTON_PIN, INPUT_PULLUP);
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
sg90.attach(SERVO_PIN);
sg90.write(90); // Inicializa el servo en posición media
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println("\nWiFi connected!");
Serial.println(WiFi.localIP());
server.on("/", handleRoot);
server.on("/ultrasonic-data", handleUltrasonicData);
server.on("/get-move-counter", handleGetMoveCounter);
server.on("/move-servo-start", handleMoveServoStart);
server.on("/move-servo-stop", handleMoveServoStop);
server.on("/start-ultrasonic", handleStartUltrasonic);
server.on("/stop-ultrasonic", handleStopUltrasonic);
server.begin();
}
void loop()
{
server.handleClient();
buttonState = digitalRead(BUTTON_PIN);
if (buttonState == LOW && previousButtonState == HIGH)
{
previousButtonState = LOW;
moveCounter++;
}
else if (buttonState == HIGH && previousButtonState == LOW)
{
previousButtonState = HIGH;
}
if (servoActive) // Solo mover el servo si está activado desde la web
{
moveServo();
}
}
void handleRoot()
{
String html = "<html><head><title>ESP32 Servo Control</title></head><body>";
html += "<h1>Control del Servo ESP32</h1>";
html += "<button id='moveServoBtn' onmousedown='moveServoStart()' onmouseup='moveServoStop()'>Mover Servo</button><br><br>";
html += "<p>Contador de movimientos: <span id='moveCounter'>" + String(moveCounter) + "</span></p><br>";
html += "<input type='checkbox' id='ultrasonicCheck' onchange='toggleUltrasonic()'> Activar Sensor Ultrasonido<br><br>";
html += "<div id='ultrasonicData'></div>";
html += "<script>\n";
html += " function moveServoStart() { fetch('/move-servo-start').then(response => console.log('Move Servo Start called')); }\n";
html += " function moveServoStop() { fetch('/move-servo-stop').then(response => console.log('Move Servo Stop called')); }\n";
html += " function toggleUltrasonic() {\n";
html += " var checkBox = document.getElementById('ultrasonicCheck');\n";
html += " if (checkBox.checked) { fetch('/start-ultrasonic').then(response => console.log('Ultrasonic Start called')); } else { fetch('/stop-ultrasonic').then(response => console.log('Ultrasonic Stop called')); document.getElementById('ultrasonicData').innerHTML = ''; }\n";
html += " }\n";
html += " setInterval(() => {\n";
html += " fetch('/get-move-counter')\n";
html += " .then(response => response.text())\n";
html += " .then(data => { document.getElementById('moveCounter').innerHTML = data; });\n";
html += " if (document.getElementById('ultrasonicCheck').checked) {\n";
html += " fetch('/ultrasonic-data')\n";
html += " .then(response => response.text())\n";
html += " .then(data => { document.getElementById('ultrasonicData').innerHTML = data; });\n";
html += " }\n";
html += " }, 500);\n";
html += "</script>";
html += "</body></html>";
server.send(200, "text/html", html);
}
void handleUltrasonicData()
{
if (ultrasonicActive)
{
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
long duration = pulseIn(ECHO_PIN, HIGH, 30000); // 30 ms timeout
float distance = (duration > 0) ? (duration * 0.034) / 2 : -1;
String data = (distance >= 0) ? "Distancia: " + String(distance) + " cm" : "Fuera de rango";
server.send(200, "text/plain", data);
}
else
{
server.send(200, "text/plain", "Sensor Ultrasonido no está activo");
}
}
void handleGetMoveCounter()
{
server.send(200, "text/plain", String(moveCounter));
}
void handleMoveServoStart()
{
servoActive = true; // Activa el movimiento del servo
direction = true; // Reinicia la dirección hacia adelante
previousMillis = millis() - interval; // Asegura que el movimiento comience de inmediato
Serial.println("Move Servo Start Triggered");
server.send(200, "text/plain", "Servo movement started");
}
void handleMoveServoStop()
{
servoActive = false; // Detiene el movimiento del servo
Serial.println("Move Servo Stop Triggered");
server.send(200, "text/plain", "Servo movement stopped");
}
void handleStartUltrasonic()
{
ultrasonicActive = true;
server.send(200, "text/plain", "Sensor Ultrasonido Activado");
Serial.println("Ultrasonic Sensor Activated");
}
void handleStopUltrasonic()
{
ultrasonicActive = false;
server.send(200, "text/plain", "Sensor Ultrasonido Desactivado");
Serial.println("Ultrasonic Sensor Deactivated");
}
void moveServo()
{
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval)
{
previousMillis = currentMillis;
if (direction)
{
currentAngle += 1;
if (currentAngle >= 180)
{
direction = false; // Cambia la dirección a retroceso
}
}
else
{
currentAngle -= 1;
if (currentAngle <= 0)
{
direction = true; // Cambia la dirección a avance
}
}
sg90.write(currentAngle);
Serial.println("Servo moving: " + String(currentAngle));
}
}
Lecciones Aprendidas
- Importancia del control del estado en IoT: Aprendí que manejar correctamente los estados (como
servoActive) es fundamental para garantizar un comportamiento esperado en dispositivos IoT. - Depuración iterativa: Resolver problemas como el movimiento continuo del servo requirió un enfoque paso a paso, revisando la lógica y los resultados en cada iteración.
- Integración entre hardware y software: Este módulo mostró cómo una buena comunicación entre ambos mundos puede lograr soluciones prácticas y funcionales.
Herramientas Utilizadas
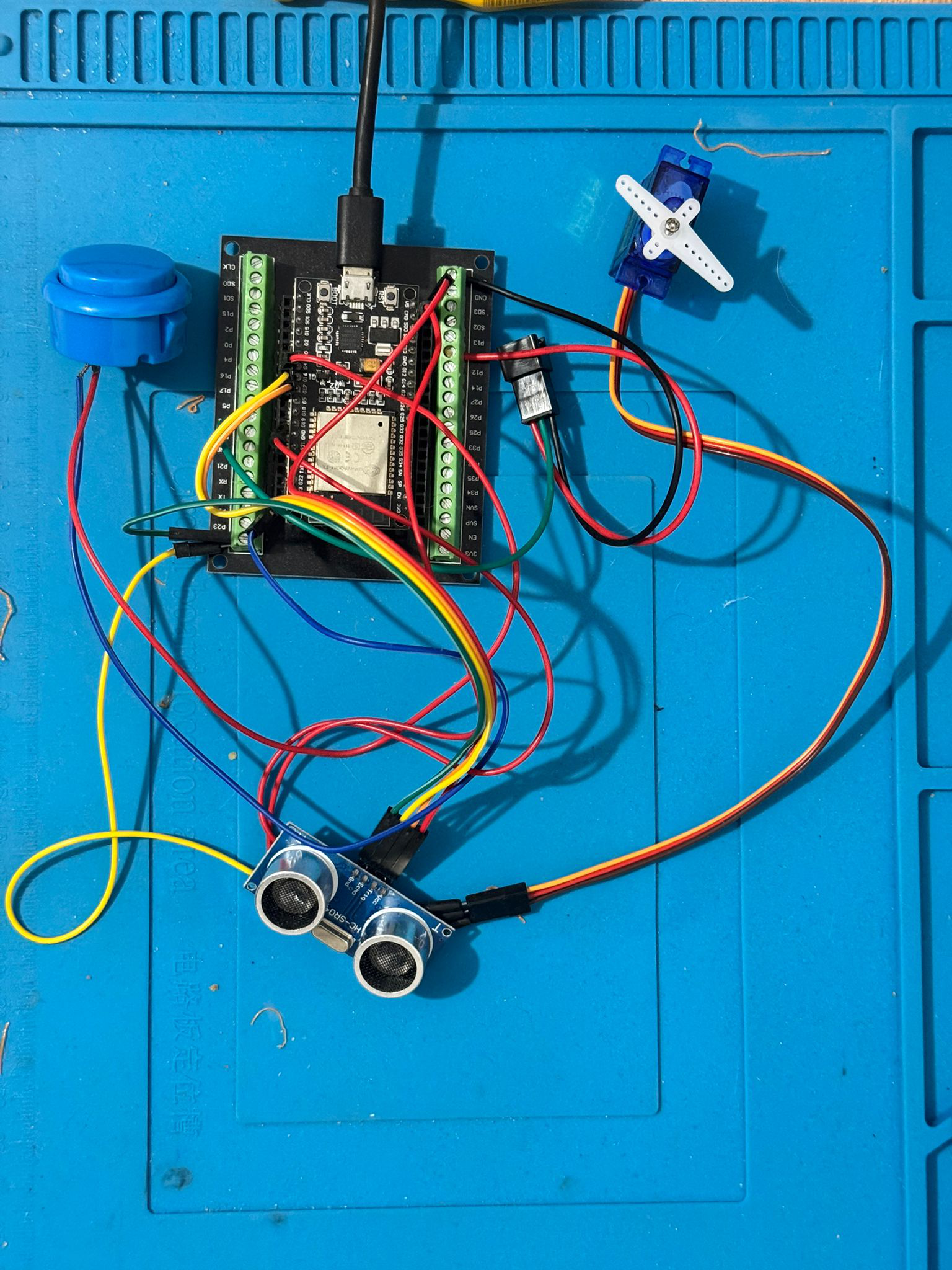
- Hardware:
- ESP32
- Servo SG90
- Sensor Ultrasónico (HC-SR04)
- Software:
- VScode + PlatformIO
- Librerías:
WiFi,ESP32Servo,WebServer
WEB
Dispositivo
Simulacion
Conclusión
El módulo MT07 fue un proyecto enriquecedor que me permitió consolidar habilidades clave en el ámbito del Internet de las Cosas (IoT) y el desarrollo integrado. A través de desafíos técnicos como el control preciso de un servo motor, la integración de un sensor ultrasónico y la comunicación en tiempo real mediante un servidor web, fortalecí mi capacidad para resolver problemas de manera estructurada y eficiente.